


Gemi Mühendisliği Haftası ve GMO'nun 68. Kuruluş Yılı Kutlandı

Türkiye Limancılık Sektörü 2019 Raporu Yayınlandı

Cold Plasma Technology in Ships

FLIR Marine, Ocean Scout Pro II termal monokülerini tanıttı
|
Geminin Etrafındaki Akışın RANS ile Simule Edilmesi
Geminin etrafındaki akışın RANS (Reynolds-Averaged Navier-Stokes) ile simüle edilmesi yeni gemi tasarımlarının manevra kabiliyetini öngörmek için gelecek vaat eden bir teknik. Bu uygulama sırasında sınırlandırılmış model testlerini andıran önceden belirlenmiş hareketler Düzlemsel Hareket Mekanizması (PMM) veya Bilgisayarla İşletilen Düzlemsel Hareket Taşıyıcısı ile gerçekleştirilir. RANS simülasyonları esnasında bir gövde kuvvet modeli aracılığıyla pervane etkisi de dikkate alınır. Pervaneye etki eden kuvvet ve momentler VLM (Vortex Lattice Method -girdap kafes yöntemi) ile farklı katsayı aralıkları için önceden hesaplanır. Simülasyonun her zaman adımında pervanenin yerine geçen ve pervane bölgesinin içindeki her kontrol hacminde bulunan denk kuvvet dağılımının üç kuvvet bileşeni önceden elde edilmiş veriler yardımıyla belirlenir. Gemiye etki eden kuvvet ve momentlerin belli hareketler esnasındaki öngörülen zaman alanları Abkowitz tipinin (2) manevra türevlerini ölçülmüş zaman alanları ile aynı biçimde belirlemek için kullanılır. Üzerinde çalışılan bir gemi için bir kez türevler belirlendi mi, söz konusu gemi için istenen herhangi bir dümen manevrasının simülasyonu doğrudan yapılabilir. Yaklaşık hidrodinamik kuvvetleri ve momentleri bulabilmek amacıyla hareket denklemleri içerisindeki manevra türevleri kullanılarak, geminin 4 serbestlik derecesindeki hareket denklemlerinin zamana göre integrali alınır. Yukarıda özetlenen teknik iki çok büyük ham petrol tankerinin manevra kabiliyetini öngörmek için kullanılmıştır. Bu makale, SIMMAN 2008 Çalıştayı’na sunulan sonuçların elde edilmesine kadar geçen süreci açıklamaktadır. CFD (Hesaplamalı Akışkanlar Dinamiği) SİMÜLASYONLARI KVLCC1 ve KVLCC2 tankerlerinin ikisinin de etrafındaki akış hem farklı statik durumlar hem de sanal olarak yalnız boy yönünde öteleme, yanal öteleme, savrulma ve birleştirilmiş yanal öteleme-savrulma testleri sırasında RANS code nepIII ile hesaplanmıştır. Dinamik testlerin tümünün simülasyonu her bir tanker için 1 milyon hücresi bulunan aynı grid kullanılarak yapılmıştır. Simülasyonlar sırasında yarı dengeli dümen dikkate alınmış ancak çevrilmemiştir. Statik durumlar için 2.4 milyon hücresi bulunan 6 ilave grid üretilmiştir. Bu gridler teknenin etrafındaki ortak bir bölümden ve her seçilen açıya çevrilen dümen için ayrı grid kutularından oluşur. Sonuçların grid bağımlılığını kontrol etmek için büyük gridlerde bazı hesaplamalar yapılmıştır. Bu hesaplamalar sayesinde grid çözülümüne anlamlı bir bağımlılık olduğu saptanmıştır. Bu incelemeye dayanarak ve hesaplanması gereken çok sayıda dümen ve sürüklenme açıları, dümen açıları ve savrulma oranları kombinasyonları dikkate alınarak bütün statik test simülasyonlarının 300.000 hücreli kaba gridlerde yapılmasına karar verilmiştir. Söz konusu durumlarda, kaba gridlerde elde edilmiş gemiye etki eden tüm kuvvet ve moment değerleri, ince gridlerde elde edilen değerlerden % 7’den daha düşük bir oranda farklıdır. Tüm gridler, ticari yazılım programı ICEM ile yapılmıştır. Gridler çoklu-blok biçiminde yapılandırılmış olup birbiri ile eşlenmemiş blok ara yüzleri bulunmaktadır. Bu son özellik pratik uygulamalar için gereken esnekliği sağlamakta ve örneğin mevcut durumdaki gibi geniş bir açıya çevrilmiş yarı dengeli horn dümeni idare edebilmek için gereklidir. Tüm hesaplamalar gemiye sabitlenmiş, hareketsiz kartezyen koordinat sistemi kullanılan bir gridde yapılmıştır. Standart iki denklemli ve duvar işlevli k-ω türbülans modeli kullanılmıştır. Dinamik testler sırasında önceden belirlenmiş hareketler sınır durumları ve bunlara karşılık RANS denklemlerine eklenen eylemsizlik kuvvetleri aracılığıyla empoze edilir (3, 4). Dinamik testlerin simülasyonu için gereken ana işlemci süresi söz konusu duruma bağlı olarak normal bir bilgisayarın tek işlemcisi için periyot başına 6 ila 10 gündü. Kaba gridlerdeki statik testler her durumda çok iyi derecede bir yakınsama için 5 saatten fazla sürmedi. Bu çalışmadaki bütün simülasyonlar söz konusu tankerlerin düşük Froude sayısına, yüksek GM (metasantr noktası) değerine sahip olmasından dolayı manevra sırasında dikkate alınmayacak değerde yalpalama olacağı göz önünde bulundurularak ve serbest su yüzeyi dikkate alınmadan gerçekleştirilmiştir. Ancak, uygulanan hareketler sırasında gemi kıçında meydana gelen çok büyük lokal sürüklenme açıları düşünüldüğünde, bu kararın sonuçlar üzerindeki belli orandaki etkisi tamamıyla görmezden gelinemez. Söz konusu tankerlerin pervaneleri için özel olarak hesaplamak yerine benzer pervane için girdap kafes verileri kullanılmıştır. Pervanenin devri; elde edilen itme kuvveti, önceden hesaplanmış geminin düz rota ileri hareketi sırasında ortaya çıkacak direnç kuvvetini dengeleyecek şekilde belirlenmiştir Aşağıdaki bütün hesaplamalar süresince bu oran sabit kalmıştır. Küçük Genliklerle Sanal Dinamik Testler Ölçümlerden elde edilen değerleri SIMMAN 2008 Çalıştay’ının diğer katılımcılarının elde ettiği değerlerle karşılaştırmak için 6.679 değerinde boyutsuz periyodu ( T’= TUₒ / Lpp) ve 0.0852 değerinde yanal öteleme hız genliği ile bir yalnız yanal öteleme testi ve T’= 4.876 değerinde periyot ve 0.30 değerinde savrulma oranı genliği (r’=rLpp / Uₒ) ile bir yalnız savrulma testi simülasyonu yapılmıştır. Deneylerin sonuçları çalıştaydan önce yazarlara açıklanmamıştır. Simülasyonlar yaklaşma hızı Uₒ=1.179 m/s olan INSEAN modeli tankerler (ölçek 1:45.714) için yapılmıştır. Simülasyon için seçilen zaman adımı yalnız yanal öteleme durumundaki hareket periyodunun 1/5000 ve yalnız savrulma durumundaki periyodun 1/3600’una tekabül etmektedir. Çalıştay kitapçığında yer alan sonuçlar organizatörlerin talebi üzerine 1:58 ölçekli MOERI modeline çevrilmiştir. Büyük Genliklerle Sanal Dinamik Testler Dümen açısı ve ileri geri öteleme hareket hızına bağlı olanlar dışında tüm manevra türevlerini elde edebilmek için büyük hız genlikleri ve T’= 3.369 ortak periyodu (model ölçekte 20 sn) ile beş dinamik test simüle edilmiştir. Boyutsuz hız genlikleri yalnız ileri geri öteleme testi için 0.10, yalnız yanal öteleme testi için 0.35, yalnız savrulma testi için 0.70 ve iki birleştirilmiş yanal öteleme-savrulma testi için sırasıyla -0.35,0.20 ve -0.20,0.40 olarak bulunmuştur. Bu uygulamada da simülasyonlar yaklaşma hızı Uₒ=1.179 m/s olan INSEAN modeli tankerler (ölçek 1:45.714) için yapılmıştır. Simülasyon için seçilen zaman adımı tüm durumlardaki hareket periyodunun 1/2500’ünde tekabül etmektedir. Yanal öteleme-savrulma testi sırasında gemi sancak tarafına dönerken belli bir zaman noktasında pervanenin hemen arkasındaki hız dağılımı görülmektedir. Sancak tarafındaki güçlü girdap ile iskele tarafındaki neredeyse dokunulmayan akış gövde kuvvetlerinin sebep olduğu hız alanı ile etkileşim içine girer. Beyaz daire gövde kuvvet bölgesine işaret etmektedir. Gemiye etki eden kuvvet ve momentler tekne ve tekne takıntıları üzerindeki basınç ve kesme gerilmelerinin integrali alınarak elde edilir. Boyuna kuvvet X’, yan kuvvet Y’ ve savrulma momenti N’ su yoğunluğu, gem hızı, uzunluğu ve su çekimi ile boyutsuz hale getirilmiştir. Statik Dümen Açısı Test SimülasyonuDümen açısına bağlı manevra türevleri farklı dümen açıları ve savrulma oranları dikkate alınarak yapılan hesaplamalarla belirlenmiştir ve bu sebeple her tanker için toplamda 42 test yapılmıştır. KVLCC2’nin sanal modelde dümen üzerinde hesaplanmış olan basınç alanı sabit ileri hareket sırasında tepede sağa doğru dönen pervanenin yarattığı hareketten etkilenmektedir. Negatif basınç bölgeleri mavi ile gösterilirken, pozitif basınç bölgeleri kırmızı ile belirtilmiştir. Şekil 4’teki yatay kesitte gösterilen hız alanı bir akış ayrımını açığa vurmaktadır. STANDART MANEVRALARIN SİMÜLASYONU Yukarıda aktarılan RANS simülasyonlarının sonuçları manevra simülasyonu için Abkowitz Tipi matematiksel bir modelin katsayılarını belirlemek için kullanılmıştır. Ne yazık ki, matematiksel modelimizde dikkate alınan beş ileri öteleme hızına bağlı türevlerin belirlenmesinde ihtiyaç duyulabilecek bazı az sayıda ilave statik test çalıştaydan önce gerçekleştirilememiştir. Benzer bir gemiden alınmış olan bu türevler hariç, tüm türevler sınırlandırılmış model testlerinin simülasyonu ile belirlenmiştir. Tablo 2’de gösterilen, su yoğunluğu, gemi hızı ve uzunluğu ile boyutsuz hale getirilen ve 1000 ile çarpılan hidrodinamik katsayılar IMO [5]’ya göre standart dümen manevralarını simüle etmek için kullanılmıştır. Bu sebeple, geminin dört serbestlik derecesindeki (4DOF) hareket denklemleri kullanılmıştır. Ancak, boyutsuz büyüklükler olan X’, Y’, N’ ve yalpa momenti K’ (gösterilmiyor)’nin meyil açısı ve yalpa oranına etkisi söz konusu tankerler için kayda değer bir yalpa hareketi beklenmediğinden dikkate alınmamıştır. Alt indisler u, v, r ve δ sırasıyla ileri geri öteleme, yanal öteleme ve savrulma hareketi hızı ile dümen açısı anlamına gelmektedir. Türevlerin gemi modellerinin kendi kendilerini sevk etme noktasında ve çalıştayın yönergesine göre belirlenmiş olmasına rağmen tüm manevra simülasyonları geminin tam ölçeğine göre yapılmıştır. Tablo 1’de test durumu gösterilmektedir. İki tankerin de sancağına doğru başlayan 10˚/10˚ zigzag testi simülasyonunun başlıca sonuçları zamana karşı hücum açısının ψ ve dümen açısının da δ olarak gösterildiği Şekil 7’de karşılaştırılmaktadır. KVLCC1 için öngörülen birinci ve ikinci overshoot açıları KVLCC2 için olandan biraz daha geniştir. Ancak, Şekil 8’de görüleceği gibi her biri IMO limitlerinden uzaktır. Bir geminin manevra kabiliyetini hesaplayabilmek için merak edilen herhangi başka bir dümen manevrası da öngörülebilir. Örneğin, Şekil 9 ve 10’da sancağa ve iskeleye 35˚lik dümen açısıyla yapılan dönme çemberi ve geri spiral test simülasyonlarının sonuçları verilmiştir. Dönme çemberi testlerinin ana parametreleri iki tanker için de benzerdir ve belli bir fazladan marjin ile IMO kriterlerini sağlamaktadır. Şekil 10’da verilen spiral test sonuçlarının grafiği iki gemi arasında bulunan görece küçük farkları vurgulayabilmek için küçük dümen açılarının bölgesi ile sınırlandırılmıştır. İki tanker de savrulma hareketi açısından oldukça dengesizdir. Gemilere karşılık gelen değişkenlik halkalarının genişliğine bakıldığı zaman, KVLCC2’nin KVLCC1’den biraz daha “az dengesiz ” olduğu görülmektedir. Ancak, 2.2˚ ve 1.4˚’yi bulan genişlikler bu tür gemiler için tamamıyla tatmin edicidir ve IMO tarafından önerilen maksimum değer olan 10˚’den de oldukça küçüktür. SONUÇLAR Mevcut çalışma KVLCC1 ve KVLCC2 tankerlerinin ikisinden de beklenen kayda değer farklılıkta manevra hareketini teyit etmemiştir. Son sözü edilen gemi savrulma hareketi açısından diğerinden daha az dengesizdir ancak ikisinde de kabul edilebilir bir dengesizlik eğrisi vardır. Ayrıca IMO ölçütlerini fazlasıyla karşılamaktadırlar. Bizim fikrimize göre, olağan manevra türevleri RANS code nepIII ile simüle edilen sanal CPMC testleri kullanılarak bir deniz taşıtının manevra kabiliyeti hakkında işe yarar bilgi edinilmesini sağlayacak kesinlikle belirlenebilir. Katsayılara dayanan matematiksel modelin ne kadar gelişmiş olduğuna bağlı olarak gerekli türevlere iyi kötü belli bir süre içinde ulaşılır. Abkowitz tipinde görece basit bir model bile savrulma kontrol kabiliyeti, savrulma dengesi, rotayı koruma kabiliyeti gibi önemli durumların anlaşılmasına yardımcı olabilir. Mevcut yöntem gemi manevra kabiliyetinin öngörülmesi ve tasarımın ilk aşamalarında farklı tasarım değişkenlerinin karşılaştırılması için faydalı bir seçenek temsil etmektedir. A. Cura Hochbaum, M. Vogt ve S. Gatchell Hamburg Ship Model Basin-Hamburg Gemi İnşa Araştırma Akademisi
İlginizi çekebilir... 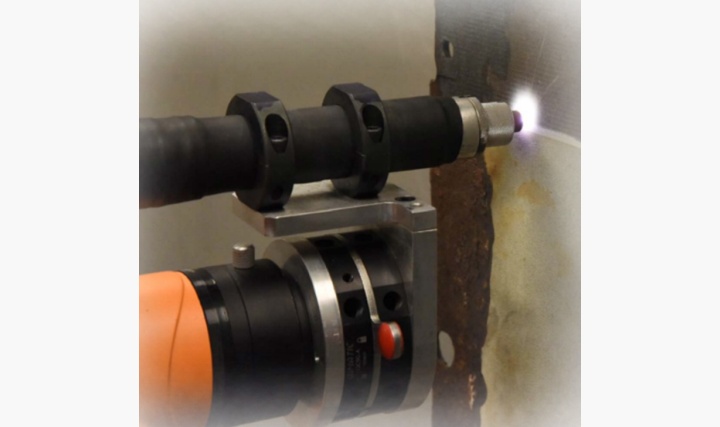
Cold Plasma Technology in ShipsDr. Seyed Hamed Pourrahmatikhalejan
Mail: hamedpourrahmati@hktm.com.tr... 
Gemilerde Tankerlerde Gaz Serbest Bırakma (Gas Free) İşlemiSezer ASLAN
Yangın, Acil Durumlar Deprem Eğitim Uzmanı
Yangın Risk Analizi, Danışman, NFPA Member... 
ISPFIRE Sapfir Markalı Yangın Söndürme Modülleri ile Yat ve Liman Yangınlarına İlk MüdahaleÜlkemizde her yıl onlarca yat, limanda veya seyir esnasında farklı sebeplerle yanmaktadır. Bu istenmeyen durum, maddi zararların yanı sıra bazen can k... |


Tersaneye Siyaset İstikrarsız, İşçi Sahipsiz

Sefine Tersanesi


TEZCANLAR Global Elektrik

Vinç Nedir? Vinç Çeşitleri Nelerdir
|
||||||||||||||||||
|
|
©2026 B2B Medya - Teknik Sektör Yayıncılığı A.Ş. | Sektörel Yayıncılar Derneği üyesidir. | Çerez Bilgisi ve Gizlilik Politikamız için lütfen tıklayınız.


 HAKKIMIZDA
HAKKIMIZDA